
In early 2025 a team from MTRU ventured up to Oban, Scotland with a FIFISH E-GO (kindly on loan from Mantsbrite) to test the underwater positioning capabilities of the Q-DVL system with some of the Tritonia team. Unlike terrestrial surveys where GPS can be used to position a drone, underwater you need to rely on other systems such as USBL or DVL. Tritonia are experts at underwater surveying and high-accuracy positioning, and their workshop is a dream come true for engineers interested in this technology, but could a compact, out-of-the-box ROV compete with the pros? To be fair, this wasn’t a like-for-like competition, but for us to further test the E-GO after the successful pool outing late in the previous year.
So on a sunny January day, with the stunning Dunstaffnage Castle in the background, we launched the RIB and set out to test the E-GO. The location provided challenging underwater conditions (dark, tidal movement, relatively featureless seabed), ideal for evaluating the system’s performance in mapping and station-keeping in real-world scenarios.

What is a Doppler Velocity Log (DVL)?
A Doppler Velocity Log (DVL) is a sensor for underwater vehicles that measures the velocity of the vehicle relative to the seabed or surrounding water column. It works by emitting acoustic waves from a transducer and then analyzing the return signals to calculate how fast the vehicle is moving through the water. This process is based on the Doppler effect, where the frequency of the sound waves changes depending on the relative motion of the source (the ROV) and the target (the seabed or water). The DVL can provide continuous, real-time data on the vehicle’s speed, position and stability.
The DVL Station Lock Module used on the FIFISH E-GO ROV brings the advantages of station-keeping, allowing the ROV to maintain a steady position and orientation despite challenging underwater conditions. This is particularly useful for inspections and surveys where precision and stability are critical, such as mapping the seabed, structural inspections or seabed sampling.
A big advantage of a DVL is that altitude (height from seabed) can be used for navigation, rather than depth from surface which can be variable based on wave height and swell. The E-GO has an option to lock a set altitude allowing the pilot to survey across varied underwater topography without having to constantly adjust vertical. This is a huge advantage for photogrammetry surveys, crucially ensuring the overlap of the surveyed area is constant (by setting the altitude with the camera lens depth of field and the distance between each survey path).
The DVL’s Role in Mapping
In the context of mapping, the DVL provides precise velocity measurements that are crucial for accurate navigation and positioning during underwater operations. For this particular test, the DVL system was used to stabilize the ROV and enhance its accuracy in following an underwater survey path. This level of stability is vital when trying to capture high-resolution images for photogrammetry or scan underwater areas without drifting off course. The station-locking functionality of the DVL allowed the ROV to stay fixed in a specific position, even with tidal movement, which often pose a challenge for traditional ROVs that rely solely on propulsion for stabilization.
The DVL used in the FIFISH E-GO ROV has been designed to perform in depths of up to 300 meters (in the W6 version) with a minimum altitude of 5 cm, although in our test we were operating at 10-15m and an altitude of 1m.
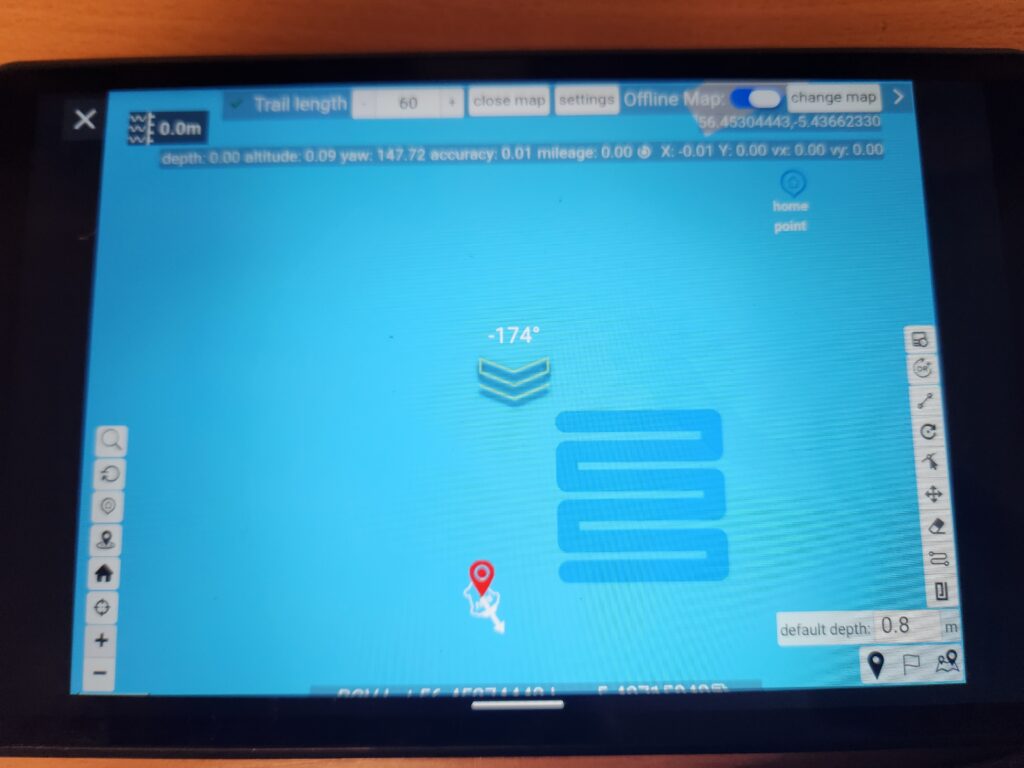
The controller app allows you to download maps to use in offline mode. Once the ROV is located in the map (this has to be done manually unless you have a GPS module for the ROV), the DVL will log the ROV’s movement once in the water. The ROV leaves a (customisable) trail length so you can see where you’ve been and other markers can be added to the map.
Our work in habitat surveying often requires grid surveys of small areas or transect paths between set points. The app allows us to draw these survey areas on the map, then the ROV can automatically fly the path at a set speed and altitude.
Game Changer or Overhyped?
We’ve become so used to technology working perfectly and intuitively that a manual isn’t necessary. Google maps (other navigation tools are available) is easy to operate, backed up with millions of people testing and providing feedback on the user interface. Could underwater navigation be this easy? TL;DR not quite.

The first thing to realise if you’re interested in underwater tech is that electronics and water do not mix. The preparation of the ROV and mapping takes time, especially if you’re learning a new system and hardware (once you know it, it would be much faster to prepare with checklists and pre-loaded maps etc). Care must be taken that all o-rings are in good condition and the ports are fully closed and watertight. The app has a function to test the ROV and alarms if it detects something unusual.
Loading the boat, the Tritonia crew commented on how light the unit is (E-GO with DVL, grabber and 2 GoPros). It can easily be held with one hand. We wrapped the controller and screen in a towel for loading as this felt very vulnerable. I would definitely put this in a pelicase to prevent damage and water splashing during loading.
Once set on location the unit was quick to power up (under 1 minute) and prepare for deployment. We had 4 people on the boat and I would recommend at minimum 3 for operations (pilot, skipper, tender), although it can be used solo depending on what you’re doing, where and how.

With a current of 0.5-1 knots, the pilot struggled to maintain position next to the boat, then the magic happened. We activated station lock on the DVL which compensated for the current and allowed the pilot to operate the ROV as if there was no current. This worked very well on our test although you could expect significant battery drain if you were using it all the time.
Visibility was 2-3m on a flat seabed, so it was necessary to pitch the ROV facing down 30 degrees so we could see the seabed to navigate. The app has attitude lock, which freezes the ROV position and allows the pilot to navigate as if the ROV was level, another very effective bit of technology.
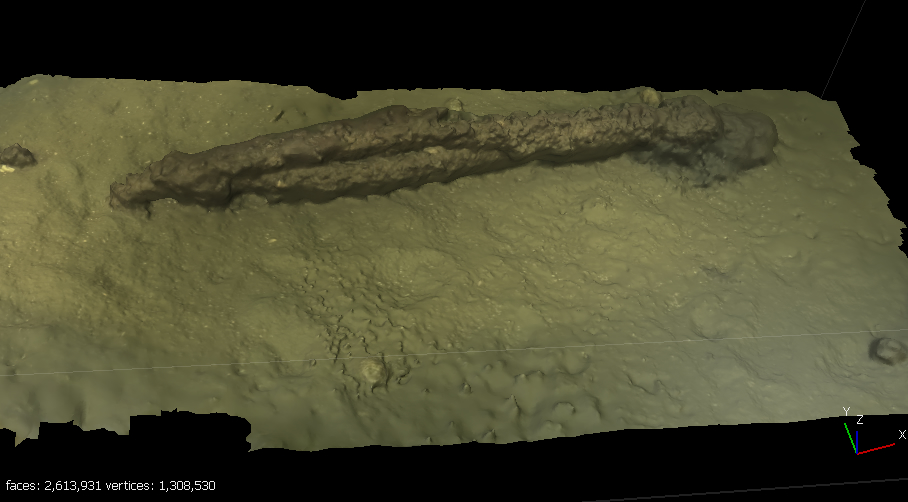
We plotted path and grid surveys using the app and with some trepidation sent the ROV off to do the survey automatically. Again, the system performed well, automatically navigating to the start point, following the set path and returning again. This is technology that has been around for a while for aerial drone users, but to see it in action underwater was a revelation and a game-changer for the work we do with photogrammetry and habitat surveying.
There is a caveat of course and nothing can be perfect. There are some aspects missing from the app at the moment that are essential for full deployment of this technology in our work. Being able to manage and import/export mapping, GPS coordinates, waypoints etc and linking it to the footage collected are really important for our surveys. The good news is that the Qysea development team and Mantsbrite were on hand (via Whatsapp) to help us with queries and be bombarded with feature requests.
Conclusion
The Doppler Velocity Log (DVL) system integrated with the FIFISH E-GO ROV provides enhanced operational stability and precision, essential for underwater mapping and detailed inspections in challenging conditions. The system’s ability to lock the ROV into a fixed position relative to the seabed, even in areas with strong currents, was a standout feature during the test and the ability to automatically navigate survey paths is a game-changer in our field. The Q-DVL will double the cost of the E-GO but in for a penny, in for a pound. Get the best bit of tech you can scrounge a budget for, you won’t regret it!